Moreover, it offers some aesthetical advantages in particular for exposed parts of the human body e.g. face. However, minimal invasive surgery has restricted the working environment of the surgeon due to the loss of two mayor human senses, three dimensional vision and haptic feedback. The haptic feedback is an important tool which helps the surgeon in localizing tumors due to the increased stiffness compared to healthy tissue (palpation). Tumorous tissue is 7–14 times stiffer than healthy tissue. Our goal is to re-establish the surgeon’s sense of touch in minimally invasive surgery, albeit with an increased sensitivity, increased lateral resolution and the new feature of depth localization, made possible by the information from preoperational data and template matching with FE-simulation.
Our working principle is based upon the combination of multiscale and multimodal elastographic measurement techniques and a soft tissue applicable FE-Model, which correlates well with the measurement. From the FE-model a large data bank will be created, which can be used to solve the under-defined measured data in real time. Therefore, the
project involves different partners combining different expertise and facilities (IAP at University of Tübingen, Klinikum at University of Tübingen, IMWF at University of Stuttgart, ISYS at the University of Stuttgart).
ITO has been involved in the development of a large scale (organ level) elastographic real time measurement tool. For this purpose a roll indenter, enabling lateral movement across the sample combined with a feedback loop controlled force or indentation depth, has been designed and manufactured at ITO’s electrical and mechanical workshops, which is displayed in fig. 1. A two dimensional displacement field was measured employing image correlation technique.
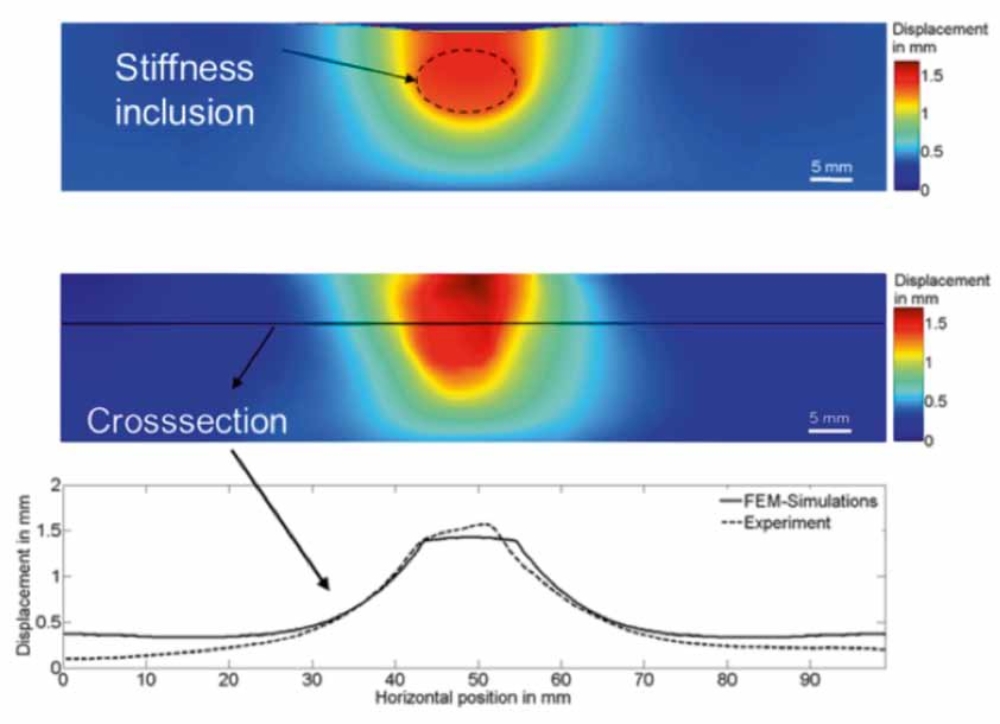
At first, silicon phantoms without [1] and with stiffness inclusions [2], characterized by well-defined geometry and elastic behavior behavior have been studied in order to generate a ground truth and to validate the system.
The displacement field obtained has then been compared with the FEM-simulations, based on the Arruda-Boyce model, created by our partners from the IMWF. As a result a good agreement between the FEM simulation and experimental data was obtained, as displayed in fig. 2 for silicon phantom with stiffness inclusion.

Supported by: Industry on Campus Project
Project: IoC105 – In cooperation with Aesculap AG
References:
[1] Claus, D. et al ”Intraoperative model based identification of tissue properties using a multimodal and multiscale elastographic measurement approach”, Proc. SPIE, Biomedical Optics, Munich (June 2015).
[2] Claus, D. et al ”Intraoperative model based identification of tissue properties based on multimodal and multiscale measurement”, Proc. SPIE BIOS San Francisco (Feb. 2015).