
99,9 % aller optischen 3D-Sensoren für raue Oberflächen lassen sich vier Hauptmessprinzipien zuordnen.1
- Triangulation (z. B. Stereovision, strukturiertes Licht
- Fokusbasierte Abtastung (z. B. konfokal und depth-from-defocus)
- Kurzkohärente Interferometrie und Holografie (z. B. WLI, OCT)
- Lichtlaufzeit-basierte Erfassung (z. B. Lidar)
Innerhalb der Gruppe arbeiten wir an einem verbesserten Verständnis dieser Erfassungsprinzipien im Hinblick auf reale Anwendungen. Simulation und Optimierung der Sensoren und Auswertealgorithmen sowie praktische Experimente sind die wichtigsten Methoden, die wir anwenden.
Insbesondere sind wir spezialisiert auf:
- Simulation und Optimierung von 3D-Sensoren
- Charakterisierung und Vergleich verschiedener Erfassungsmethoden
- Anwendungen in der Realität
- Expertensysteme für die Planung von Sensoren und deren Konfigurationen
- Bildverarbeitung
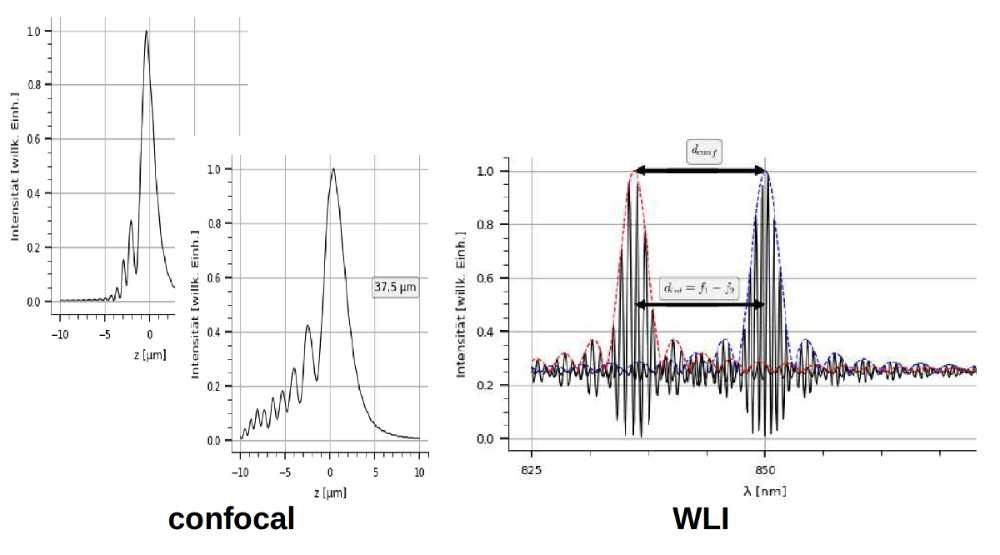
Fig. 1: Simulation von unterschiedlicher Messsignalen
1 Die Einteilung in diese vier Bereiche ist teilweise willkürlich und man könnte z.B. argumentieren, dass auch Interferometrie und Holographie lichtlaufzeitbasierte Techniken sind oder dass die konfokale Mikroskopie ein spezieller Teil der Triangulation ist.