
Eines der großen verbleibenden Probleme, die es für Fahrassistenzsysteme bzw. autonomes Fahren zu lösen gilt, ist eine robuste Datenerfassung unter Schlechtwetterbedingungen (Nebel, Schneefall, Starkregen) zu gewährleisten. Dies versucht das Institut für Technische Optik in einem Verbundforschungsprojekt mit dem Fraunhofer-Institut für Physikalische Messtechnik (IPM) und dem Institut für Autonome Intelligente Systeme (AIS) der Universität Freiburg zu lösen. Dabei konstruiert das IPM ein Lidarsystem, das speziell für den Einsatz unter Schlechtwetterbedingungen optimiert wird, während wir zur Unterstützung der Lidardaten eine sogenannte „Time-gated Single-Pixel-Kamera“ entwickeln, die zusätzliche Daten für interessante Regionen der Punktwolke generieren soll. Das AIS verknüpft die Datenströme mit Hilfe multimodaler neuronaler Netze.
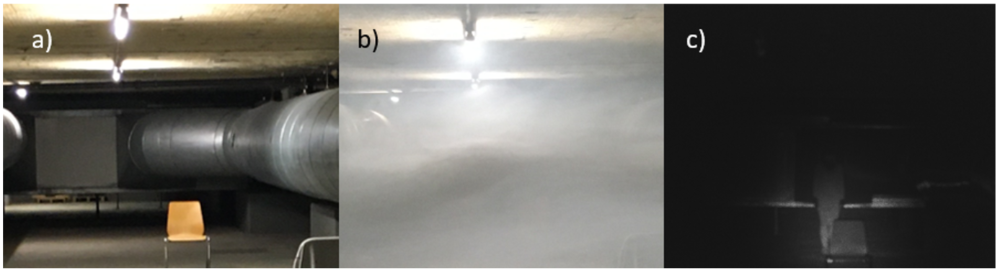
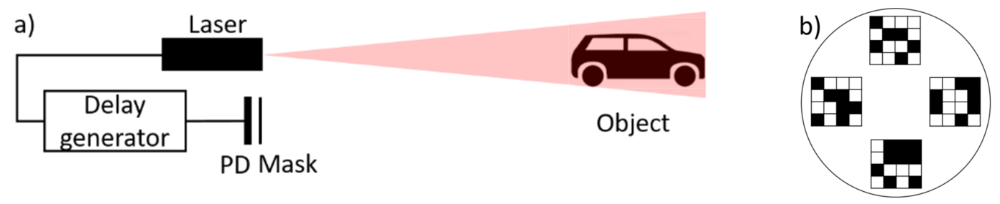
Mit kommerziell erhältlichen Kameras wurde bereits die verbesserte Performance durch time-gating unter schlechten Wetterbedingungen gezeigt. Allerdings ergeben sich durch time-gating sehr niedrige Signalhöhen insbesondere bei dichten streuenden Medien und kurzen Gating-Intervallen. Um dennoch ein Signal-zu-Rausch-Verhältnis größer eins zu erhalten, sollte der Beleuchtungspuls mit so viel Leistung wie möglich betrieben werden. Daher bieten sich Wellenlängen im Infraroten an (beispielsweise die von uns gewählte Wellenlänge 1540nm), um trotz hoher Pulsleistung Lasersicherheit zu gewährleisten. In diesem Wellenlängenbereich ist die Kameratechnik (noch) nicht so hochentwickelt wie im sichtbaren Spektrum, insbesondere wenn Gating-Zeiten im niedrigen Nanosekundenbereich erwünscht sind. Eine signalstärkere, schnelle und kostengünstige Detektionsalternative ist eine Photodiode. Um damit räumliche Informationen registrieren zu können, schalten wir eine Reihe von Masken vor. Die Anzahl Masken kann im Vergleich zu der Anzahl Kamerapixel erheblich reduziert werden, da die Szene in unserem Sensorsystem hoch komprimierbar ist. Dies ist ein Compressed Sensing Ansatz, allerdings wollen wir nicht die binäre Messmatrix (die Masken) vorgeben. Daher trainieren wir die genaue Zusammensetzung der Masken mit einem neuronalen Netz, um eine möglichst optimale Objekterkennung bei einer möglichst kleinen Maskenanzahl zu erreichen.
Finanziert durch:

Verantwortliche

Claudia Bett
M.Sc.Wissenschaftliche Mitarbeiterin